Rijkswaterstaat heeft meerdere fysieke en visuele markeringen in gebruik die goed aangeven waar een schipper wel of niet mag varen. Zo liggen er boeien in het water om te markeren dat de vaarroute daar ophoudt. Ook digitaal kan de schipper via zijn systeem aan boord zien waar hij wel of niet mag varen. In aanvulling op de bestaande vaarwegmarkering gaat Smart Patrol met een horizontale laserstraal testen op de vaarweg. Er wordt onderzocht of dit de veiligheid van een stuw- en sluispassage kan vergroten in het donker en in situaties met slecht zicht.
De laser gezien vanaf het water
De rode laser sluit de vaarweg visueel af
Ambitie
Veilige passage stuw- en sluiscomplexen
Er wordt onderzocht of een laserbarrière de veiligheid kan vergroten bij de passage van stuw- en sluizencomplexen. Door middel van een rode laser over de vaarweg wordt aangegeven dat een schipper niet naar de stuw, maar naar de sluis moet varen.
Bij slecht zicht en in het donker is de laserbarrière voor de schipper goed zichtbaar en sluit deze een deel van de vaarweg visueel af. Onder slechte weersomstandigheden is sommige vaarwegmarkering minder goed zichtbaar. Een oplichtende ‘laser’ kan in deze situatie meer duidelijkheid bieden.
Test in Heel
Kleine test bewijst technische haalbaarheid
In december 2022 heeft Smart Patrol een eerste test met een laserbarrière in Heel uitgevoerd. Tijdens deze test zijn verschillende laserstralen, verschillende wattages en verschillende kleuren getest. De kleine proef is uitgevoerd op een afgesloten gebied, op het land. De succesvolle resultaten hebben geleid tot een grotere proef op de vaarweg in 2024.
Uitgeschreven video-tekst
Smart Patrol test of het gebruik van laserstralen een goede manier is om duidelijk te maken wat de juiste vaarroute is, zodat sluizen en stuwen veilig worden gepasseerd.
We zijn vandaag in Heel, vlakbij Sluis Heel. We gaan een laser testen, dat is een laserbarrière. En dat gaan we nu eigenlijk in een mini-test uitproberen.
Het voordeel is dat het een goedkopere, simpele manier is om een verhoogde veiligheid te creëren bij de bij de passage van de stuwen en de sluizen. We hebben hier verschillende lasers getest. Een 2 watt sterkte, 5 watt en 10 watt. Die hebben we geprojecteerd in verschillende kleuren. We zien verschillende kleuren zeg maar minder of beter. En die hebben we dan vervolgens ook in verschillende hoeken getest. Als je recht de laser inkijkt, dan zie je hem het best en hoe verder je schuin gaat, hoe minder goed je hem ziet. En dat is van invloed op een eventuele vaarweg gebruiker, in welke hoek die na een laser gaat varen op een gegeven moment.
Ik vind het mooie presentatie. Ik ben alleen nog sceptisch over de mogelijkheden zoals dat de binnenvaart het zeg maar vanuit het stuur het op het water gaat zien.
Aangenaam verrast , ik had niet de verwachting dat er met lasers zoveel mogelijk was. Ik ben alleen wel heel erg benieuwd hoe dit er op het water uit gaat zien, visueel.
Ik had er eigenlijk nauwelijks een voorstelling van, maar ik zie er zeker potentie in, ik zie zeker wel mogelijkheden.
Een vervolgstap is, is dat we dit gaan evalueren. We gaan kijken van wat heeft het opgebracht. En is dit mogelijk iets wat bij een object getest kan worden.
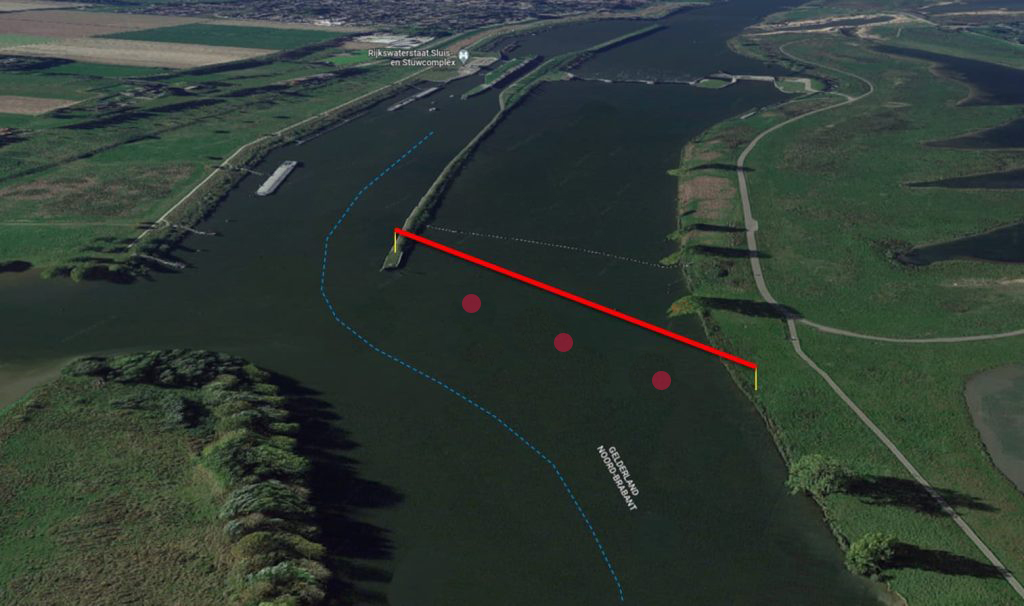
Visuele weergave van de laserbarrière bij stuw Lith (Beeld: Google)
Resultaten
Grote test toont onvoldoende meerwaarde
Tijdens een langdurige praktijktest op de Maas, is samen met schippers en ervaringsdeskundigen de meerwaarde onderzocht van de laserstraal. Uit die analyse blijkt dat laserstralen als aanvullende scheepvaartmarkering, onvoldoende meerwaarde bieden voor een veiligere passage van stuw- en sluiscomplexen. De belangrijkste reden hiervoor is dat de zichtbaarheid van de laser afhankelijk van de weersomstandigheden, sterk varieert. Het project is met deze inzichten afgerond.
Hallo RWS-collega,
Werkt u bij Rijkswaterstaat? Bekijk dan onze Rijkportaal-pagina voor de meest actuele en uitgebreide informatie.